分析工具库 l1-path-finder
#
简介
A fast path planner for grids.
这是一个针对二维迷宫的快速路线规划算法,JS 的实现版本,下文简称 l1。在大概了解这个库之后,想到了三点用途:
- 在作为嵌入式脚本时,指导机器进行简单的路线规划
- 在基于 BS 的游戏中作为玩家的辅助,比如自动寻路
- 用于地图应用,寻找最优路线
l1 支持在 nodejs 和浏览器环境运行。l1 的作者说这个库的算法性能不错,甚至可以和 C++ 的实现比肩,并给出了性能指标对比,有兴趣的小伙伴可以比较一下。
在线示例
项目主页有一个非常有趣的 DEMO

若干蓝色小球有各自的起点和终点,它们被 l1 规划好了路线,不断地穿越迷宫徘徊于起点终点。这里有一个不易发现的功能:可以点住某一个点不放,小球们就会改变命运,向这个点全速前进。
源码分析
可以说 l1 的技术含量中,算法占主要部分。
A* 算法
核心算法是一种叫做A*的搜索算法,用来计算从起点到终点的最短路径。这里从非专业角度简述一下过程,从起点开始每次移动前都需要进入如下步骤。
计算当前位置的下一个可移动的点的的权值 weight = distence + heuristic,其中 distence 表示起点到这个点的距离,heuristic 表示这个点到终点不考虑障碍物的距离,叫做启发性估值。
// 源码片段
v.heuristic = heuristic(this.landmarkDist, this.dstX, this.dstY, v)
v.weight = Math.abs(this.srcX - v.x) + Math.abs(this.srcY - v.y) + v.heuristic
然后取 weight 最小的那个点进行移动。
重复上面的步骤,最终会到达终点并得出最短的那条路径。
缩小搜索范围
假设二维迷宫是按照网格划分的,A* 算法对于路径的探索是一个格子一个格子计算的,l1 做了一些工作把迷宫抽象成一个 visibility graph。
l1 依赖了另外一个 JS 库 contour-2d 获得迷宫墙壁的轮廓多边形,筛选出“凸点”,并两两相连成为一个 visibility graph,如下图所示:
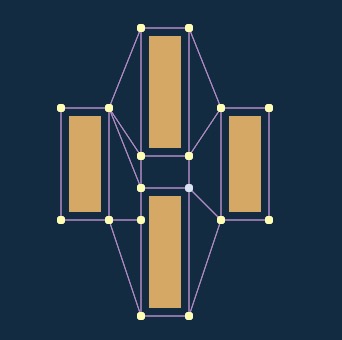
其中黄色矩形表示墙壁,紫色线条表示 visibility graph,这样 A* 算法就可以基于这个 graph 来进行搜索了。
这个过程中用到了一个判断两点之间没有任何障碍物的算法。
proto.stabBox = function(ax, ay, bx, by) {
var lox = Math.min(ax, bx)
var loy = Math.min(ay, by)
var hix = Math.max(ax, bx)
var hiy = Math.max(ay, by)
var s = this.integrate(lox-1,loy-1)
- this.integrate(lox-1,hiy)
- this.integrate(hix,loy-1)
+ this.integrate(hix,hiy)
return s > 0
}
用到了积分的数学知识,非常优美非常有趣,这里就不深入分析了,有兴趣的小伙伴可以研究体会一下。
上图只给出了一个简单的例子,如果迷宫很复杂,有很多“凸点”,graph 的连线数量会成指数级增长,然而我们并不需要这么多连线,因此 l1 使用最小生成树(Steiner tree)算法进行优化,降低搜索过程中的开销。
总结
平时不太研究这种级别的算法,在分析 l1 的时候,很多算法看了代码也不太懂它为什么这么写,分析过程如果有错误请大神多多容忍和指导。自己也找到了当初开始学习编程时的感觉,那时候看 HTML 都是一堆乱码,不过这也激发了学习的热情。